Financiado em grande parte pela IUS – Instituições Universitárias Salesianas, através deste laboratório está sendo desenvolvido um ambiente com vários recursos de reabilitação para pacientes cérebro-lesionados e vítimas de amputação. Contará com vários recursos, um deles é um “Exoesqueleto para Membros Superiores”, que posteriormente será utilizado na Clínica de Fisioterapia do Unisalesiano. Também estão sendo desenvolvidos exoesqueletos para mãos (reabilitação) e pernas (caminhada e reabilitação), respectivamente.
O projeto inclui o desenvolvimento de várias etapas, que envolvem diversos equipamentos, apresentados na sequência:
Automação e Controle
Abaixo apresentamos três módulos de automação desenvolvidos para controle e acionamento do exoesqueleto. O módulo da esquerda consta de um conjunto de dispositivos elétricos preparados para acionamento de motores de médio e grande parte. Este módulo foi previsto visando possíveis alterações (implementações) futuras no projeto como, por exemplo, acionamento de esteira, acionamento de motores para exoesqueleto de membros inferiores etc.
O módulo central é um painel composto por um Controlador Lógico Programável (CLP) marca Weg Clic 02. Entretanto, o que chama atenção neste módulo é que o mesmo foi projetado para possibilitar seu uso em aulas de Engenharia, principalmente Eletrônica, Automação e Controle e Servomecanismo. Para isto, observa-se que o módulo é disposto de cabos com conexão intercambiável tipo macho-fêmea, possibilitando que o professor oriente possíveis conexões ou desconexões com elementos atuadores (motores, válvulas etc.), ou sensores.
O terceiro módulo foi preparado também para atuar como um elemento de automação em controle, possível de ser utilizado em aulas como as mencionadas anteriormente. Na verdade, trata-se também de um CLP, porém, desenvolvido com uma plataforma Atmega Arduino, com uma placa com 8 relés
Desenvolvimento da estrutura do exoesqueleto.
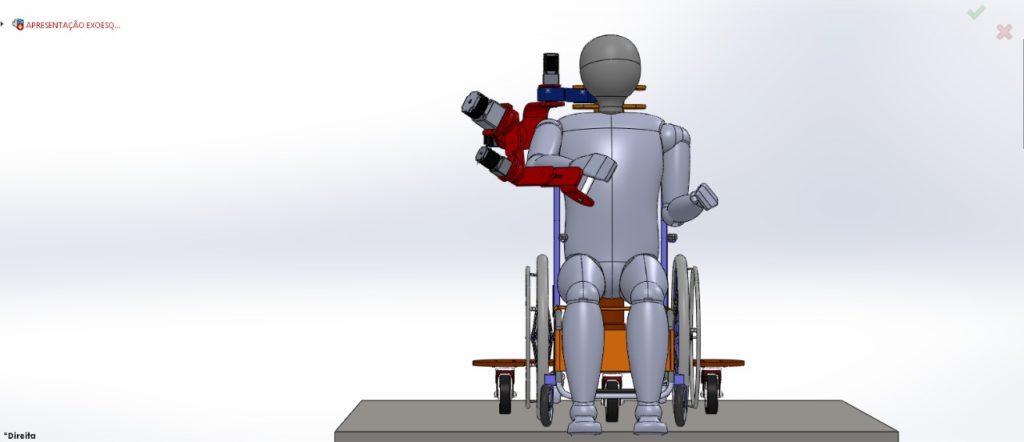
Após ampla pesquisa exploratória em referenciais teóricos confiáveis, projetou-se uma versão inicial (2016/2017), ainda bastante básico. Em seguida, apresentamos o resultado da segunda versão do projeto, ressaltando que nesta versão do exoesqueleto, projetou-se uma solução que permitia que o equipamento operasse para ambos os braços, direito e esquerdo, diferentemente da maioria dos modelos de equipamentos desta natureza (Figura 2). Esta versão possuía 3 graus de liberdade (ou, no inglês, D.O.F. – degree of freedom), que são os tipos de movimento que o aparelho efetuaria. A quantidade de DOF determina a maior ou a menor funcionalidade ou possibilidade de motilidade do conjunto do dispositivo, e isto afeta diretamente o quanto o mesmo atinge uma quantidade maior ou menor de regiões a serem tratadas e reabilitadas. Portanto, ter um maior DOF significa maior ação terapêutica. Para esta versão, inclusive, desenvolveu-se três protótipos de testes funcionais, conforme mostrado na Figura 3, sendo um protótipo aqui a versão em madeira MDF, e outra versão em material PLA (polímero de poliácido láctico), prototipado em impressora 3D.
Entretanto, consideramos mais conveniente buscar uma outra solução, que aumentasse os graus de liberdade de operação do exoesqueleto.
Para isto, foram realizadas uma série de reuniões com os acadêmicos participantes do projeto, assim como coordenador do projeto, e também iniciamos diversas discussões com colaboradores do projeto, buscando-se aumentar o DOF do exoesqueleto.
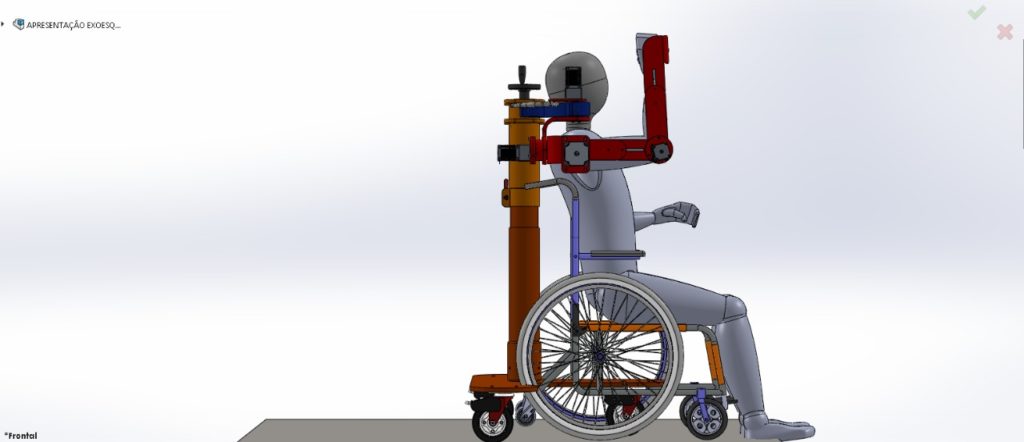
A última versão poderá executar os 6 graus de liberdade seguintes: ombro: flexoestensão, abdução-adução, rotação medial e lateral; Cotovelo: flexoestensão; Punho: flexoestensão de punho. Com esta ampliação das possibilidades de reabilitação do equipamento, praticamente teremos um aparelho que permite a mesma funcionalidade de dispositivos considerados de ponta existentes no mercado internacional, ou desenvolvidos por universidades no exterior.
O projeto do laboratório começou a se tornar realizade a partir das ações estratégicas e táticas do Prof. Edval Rodrigues de Viveiros, coordenador do projeto, colaboração e co-orientação do Engenheiro e fisioterapeuta Fernando Henrique Alves Benedito, e dos professores Rodrigo Simon, Francis Martins, e ainda os coordenadores Nelson Hitoshi Takiy, Rossana Abud (Engenharia de Bioprocessos e Biomedicina),Maria Aparecida Teixeira Bicharelli (Engenharia da Computação, Jogos Digitais, TDS) e Carla Komatsu Machado (Fisioterapia). Agradecimentos especiais pela constante colaboração dos professores Amadeu Zanon Neto, Daniel Oliveira e Fernando Eguía e Odilon Caldeira Filho. Finalmente, agradecimentos ao Reitor do Unisalesiano, Padre Luigi Fávero e ao Pró-reitor Acadêmico Prof. Dr. André Ornellas, pelo apoio nos mais diferentes âmbitos deste projeto.
-
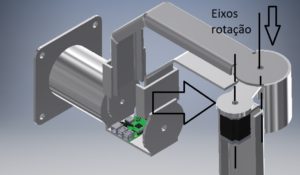
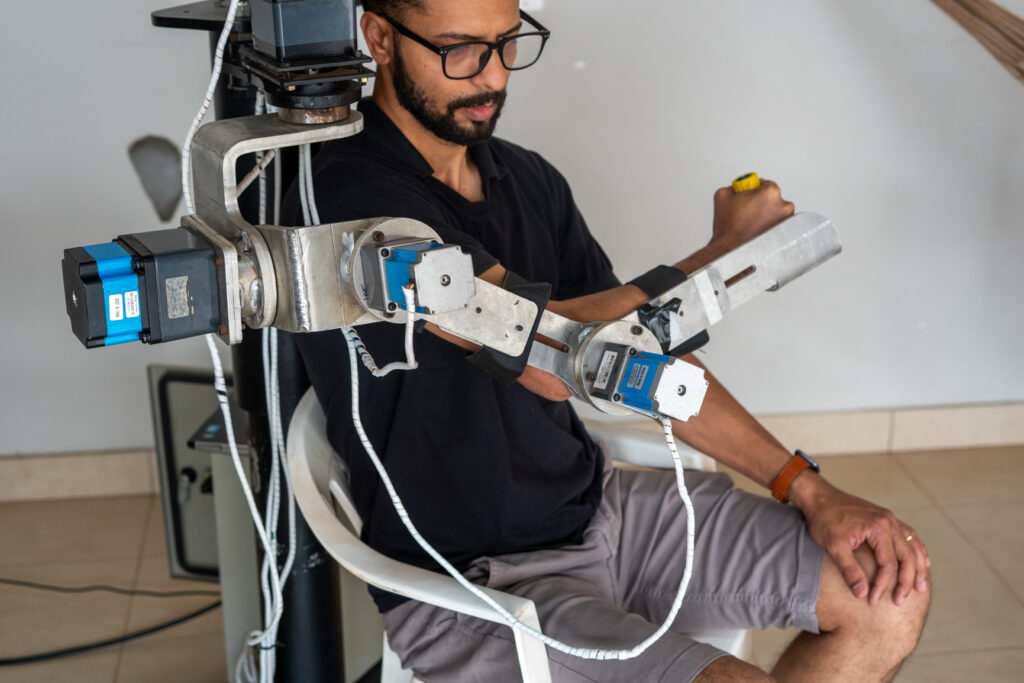
- Eixo vertical para rotações interna e externa de ombro

-
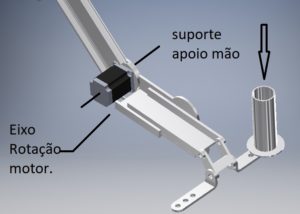
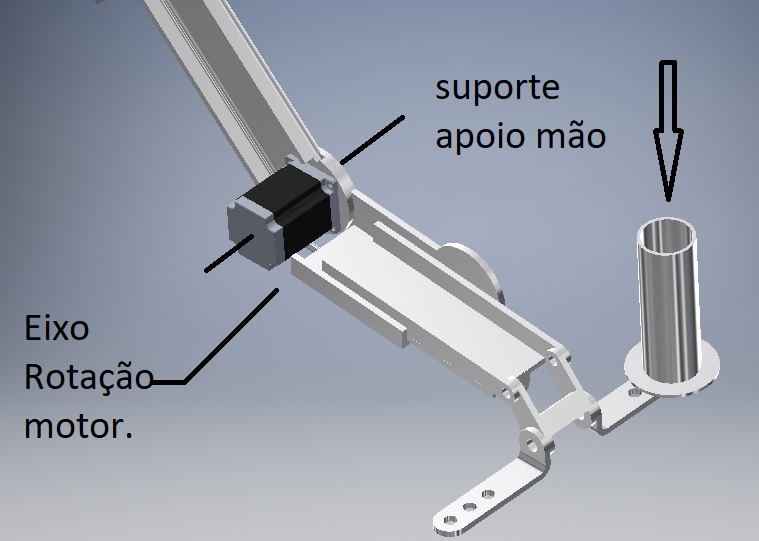
- detalhe da manopla e de cotovelo.
-

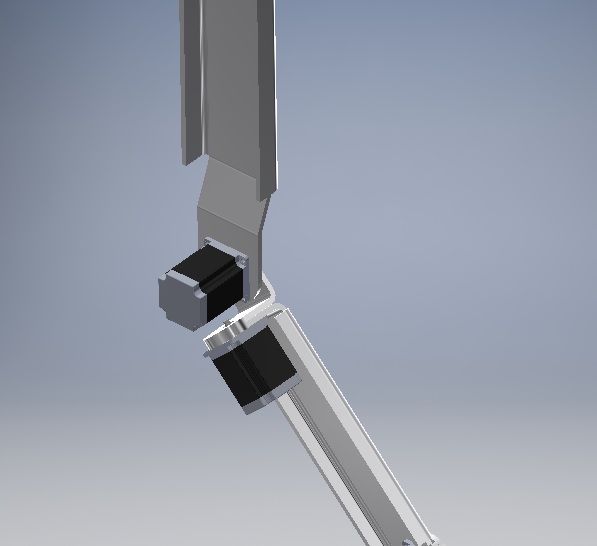
- Atuadores de flexoextensão e rotações do braço sobre o próprio eixo.
-

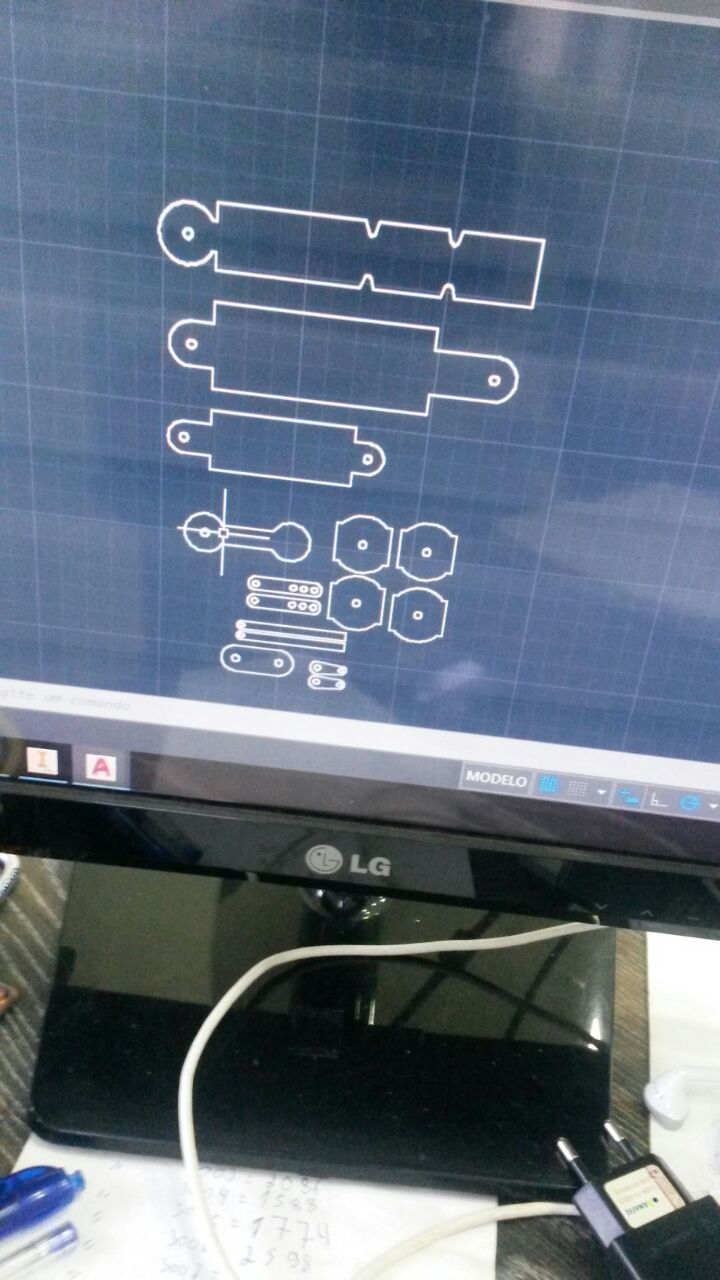
- Chapas de aço cortadas para serem dobradas

-
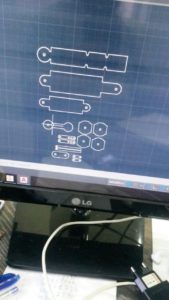
- Desenhos das chapas a serem cortadas (estrutura do exoesqueleto)